Deformable elements such as cables, hoses, wires, and ropes are involved in several applications both in domestic and industrial scenarios: just think about tying the laces of your shoes, or plugging the charger of your mobile phone, or wiring all the cables inside your computer or your car. In particular, cables are widely employed in the automotive and aerospace industries, especially in routing operations. In industrial frameworks, cables manipulation is usually carried out by human operators, representing a bottleneck for several applications. The automation of these operations would hence bring considerable economic benefits and relieve operators from these repetitive tasks. However, granting robots to properly manipulate cables is challenging due to the complex modeling of the deformation of these elements and to the non-trivial description and sensing of their shape.
Continue reading “Touch and slide: cable routing operations with collaborative robots”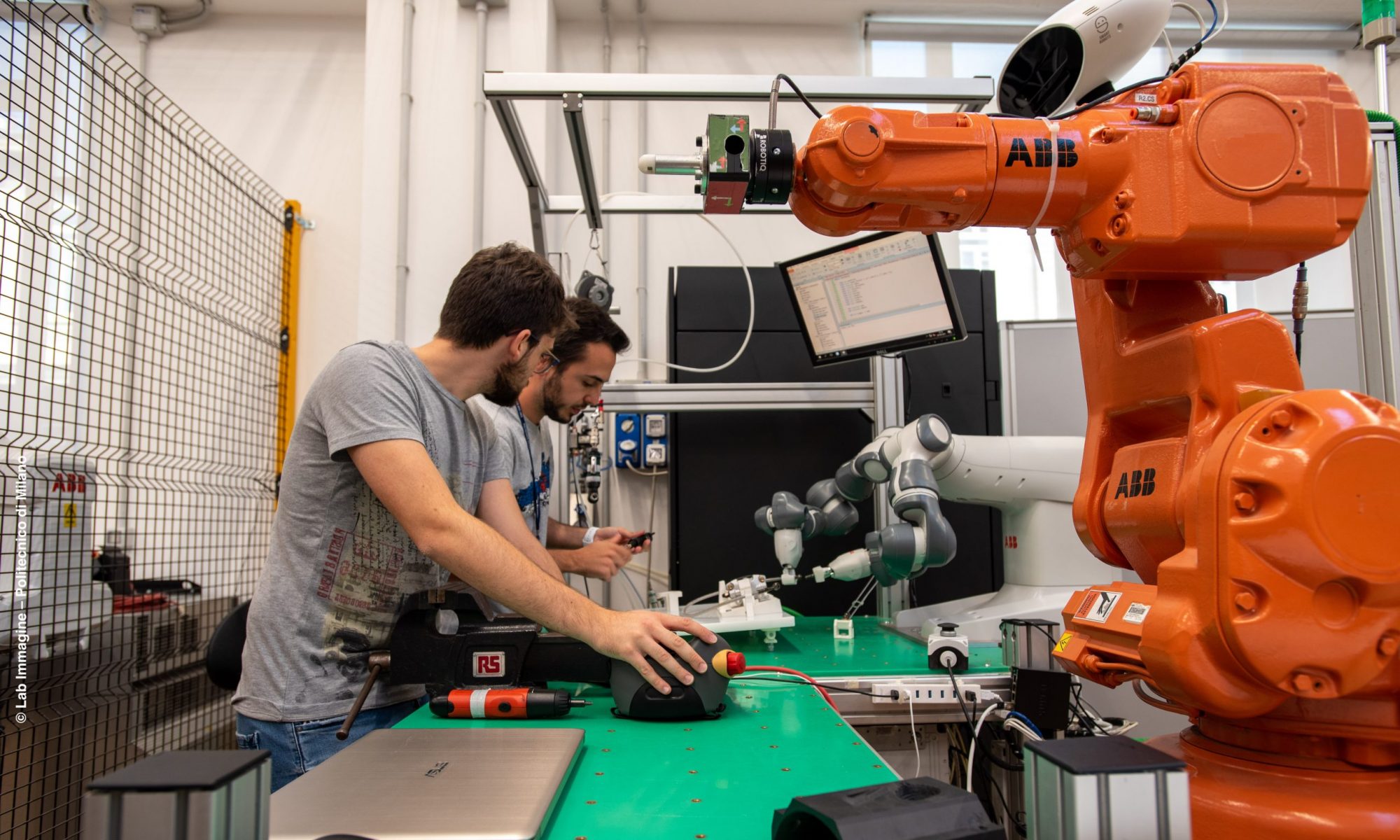
Mechatronics and Robotics Lab