
How many times do we feel exhausted after an intense workday? Maybe we did our best at work and then we feel like our own physical and mental resources just disappeared… or we feel like we weren’t able to operate at maximum efficiency, inevitably collapsing into a heap of perceived failure.
In today’s society the modern work paradigm often seems to ask us to do more in less time, and do it well. However, this “fast-and-well” work culture intrinsically incorporates the elements that, in the long run, can lead us to be less productive, or undermine our psycho-physiological safety. This might not only entail serious productivity loss but also lead workers to burnout, overstress and absenteeism.
So, where can we buy the ticket for a workday filled with less stress and more throughput? Is it just utopia the idea of simultaneously improving both workers’ well-being (reducing stress in the workplace) and job performance? Although this may seem unrealistic, it’s not. Today the collaborative robot (a.k.a. cobot) can be a key ally to help the industrial shop-floor worker achieve both these objectives!
How? The key answer is enclosed in the worlds of game theory, strategic decision making and reinforcement learning. But let’s proceed one step at a time. According to the psycho-physiological theory, the relationship between stress and performance is described by an inverted U-shaped curve, as illustrated hereafter. This means that, while too little stress results in boredom and demotivation (calm) and seems not to boost our productivity, moderate stress levels are beneficial in terms of performance (eustress), but only up to a certain point. After that, the increase of stress has a negative impact on both our safety and performance (distress), leading to mental exhaustion and poor productive capabilities.
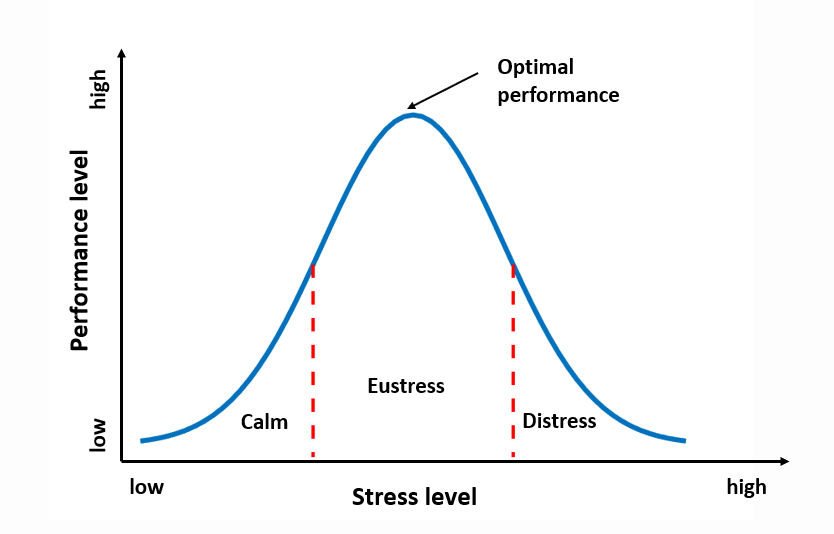
So, stress and performance are strongly interrelated and staying on top of the curve (where just the right amount of stress allows us to achieve the peak performance) is a delicate balancing act and –of course– a matter of trade-offs and equilibria!
Wouldn’t it be great if the cobot could help us reach this optimal stress-performance point? Here’s how to do that.
At Politecnico di Milano, we enabled the cobot to autonomously adjust its behaviour during the interaction with the human co-worker to simultaneously increase his/her performance and mitigate work-related stress.
The very first ingredient to let the cobot realize this strategy is to monitor in real-time the stress and the performance of the human worker. Then, to express the trade-off between the human stress minimization and performance maximization, we borrow some elements of game theory.
Indeed, game theory is the science that studies the optimal decision-making of competing and independent agents (a.k.a. players) in strategic frameworks. The core of game theory is the so-called ‘game’, which is used as a model of the interaction between rational players. Each player is then a strategic decision-maker within the situation exemplified by the game. Given the circumstances that can arise within the game, each player decides which action to take among a predefined set. The combination of simultaneous game actions played by the agents is called ‘game outcome’. This represents a possible state that the players can reach during their interaction. For each game outcome, each agent receives a payout (a.k.a. ‘payoff’ or ‘utility’), i.e. a numeric value quantifying the player’s level of satisfaction with respect to that outcome.
In human-robot collaborative frameworks, typically, a human operator and a cobot cooperate to accomplish a certain task. Clearly, the way they behave during cooperation influences the human attitudinal state in terms of stress and performance. Unfortunately, this influence cannot be predicted a priori.
So, game theory provides the theoretical framework to model how the actual human-robot interaction is affecting the stress and performance of the human worker. To realize the model of this trade-off, we reinterpret the interaction between human and robot as a game between two self-interested agents: H and R. These are used to express the two competing aspects of whatever working framework: be productive on one side, and keep stress low on the other side. As displayed in the following figure, we assume the goal of player R is to maximize productivity and the one of player H is to minimize stress. Then, we exploit the game actions to express the possible behaviours adopted by the human and the robot during the interaction. Indeed, we assume that each player can adapt to the other one (i.e. playing action D) when it is aligning to the goal of the other player or do not adapt (i.e. playing action ND), in the opposite case.
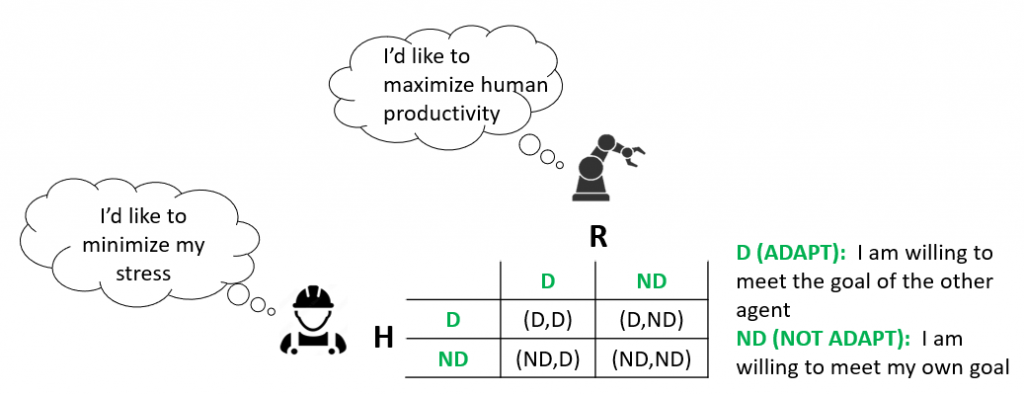
So, this game-theoretic model allows us to evaluate the admissible stress-performance compromises (outcomes) that the human-robot interaction can produce. Besides, it also let us identify the particular game outcome (Nash equilibrium) that represents the local equilibrium state of the game and a “no regrets” situation for the agents. This is due to the fact that, by definition, the Nash Equilibrium is a game outcome that, once reached, means that no player can increase its payoff by changing actions unilaterally. Thus, in the considered case, the Nash Equilibrium give us the chance to identify the local stress-performance equilibrium compromise.
But how to make the cobot apply the right behaviour to optimize this trade-off?
This time the answer is reinforcement learning. Basically, we penalize or reward the robot behaviour proportionally to its positive or negative influence on the human attitudinal state in terms of stress and performance. The game model serves to evaluate this effect. In our Lab we applied this approach and validated it in a real human-robot collaborative assembly task, as shown in the following video.
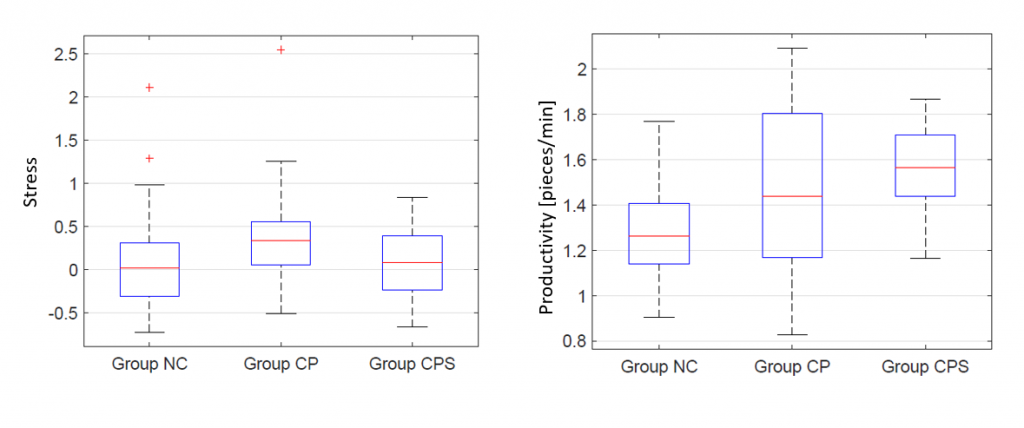
During the experimental campaign, we compared the effects of three different techniques in terms of human stress and productivity:
- the full strategy just described (CPS), where the cobot autonomously adjusted the production rhythm (a.k.a. pace of interaction) to jointly optimize both human stress and performance;
- a strategy (NC) where the robot simply followed the production rhythm decided by the human, without optimizing productivity or stress;
- a strategy (CP) where the robot varied the pace of interaction to solely stimulate the human productivity, regardless of his/her stress.
The results, illustrated hereafter, revealed that only the proposed strategy (CPS) was effective in simultaneously achieving the highest productivity level and a significant stress mitigation. Besides, they also showed that a suitable variation of the pace of interaction, applied by the cobot, is the key to realize the desired optimization.
References:
- G. Weiss – Multiagent systems (ed.), The MIT Press, Cambridge, Massachusetts, 2013.
- C. Messeri, G. Masotti, A. M. Zanchettin, P. Rocco – “Human-Robot Collaboration: Optimizing Stress and Productivity Based on Game Theory”, IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8061-8068, Oct. 2021.